Slope Concept 1 – Understanding the Basic Concepts of Slope
Note: This is the first part of the the Slope Concept Series. The sequels of this article are Part II – Slope of the Graph of a Linear Function and Part III – Slopes of Vertical and Horizontal Lines.
***
The slope is known to be the steepness of a line. Sometimes it is described as “rise over run,” If we are on point A, we go up 4 units and we go right 5 units (see Figure 1) then our rise is 4 and our run is 5. Let us mark our new location B. Notice that the order of movements does not matter. We can also go 5 units right and 4 units up and you will still be in B (see Figure 2).
If we do our movement in the coordinate plane starting from the origin, our rise would be our vertical movement (change of movement with respect to the y-axis) and our run would be our horizontal movement (change of movement with respect to the x-axis). In Figure 2, segment AB has rise 4 and run 5. Thus, the slope of segment AB is 

Figure 1 - Segment AB with rise 4 units and run 5 units.
The slope of a line (or a segment) may also be described as the angle it makes with a horizontal line. Technically speaking, it is a counterclockwise rotation with the line starting from a horizontal position about a point which is located on that line, or the origin our case. In Figure 2, 

Figure 2 - Counter-clockwise rotation of AB to AB' about A.
Looking at triangle ABC, since the given sides are the side adjacent and the side opposite to 

Figure 3 - Triangle ABC with Slope 4/5.
If we examine the value of 

If the line is vertical, there is no (zero) change in x. That makes the denominator of the fraction change in x
In the continuation of this article, we will discuss further about the properties of slope. We will discuss why the slope of a straight line is constant. We will further discuss zero, undefined, negative and positive slopes. We will also discuss how the concept of slope helps in solving calculus problems and how it is used to determine the behavior functions.
 of the trapezoid with bases
of the trapezoid with bases  and
and  and altitude
and altitude  is given by the formula
is given by the formula 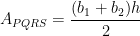 .
.

 . Simplifying, we have
. Simplifying, we have 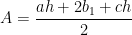 . Factoring we have,
. Factoring we have, ![A_{PQRS} = (a + 2b_1 + c) \frac{h}{2} = [(a + b_1 + c) + b_1] \frac{h}{2}.](http://s0.wp.com/latex.php?latex=A_%7BPQRS%7D+%3D+%28a+%2B+2b_1+%2B+c%29+%5Cfrac%7Bh%7D%7B2%7D+%3D+%5B%28a+%2B+b_1+%2B+c%29+%2B+b_1%5D+%5Cfrac%7Bh%7D%7B2%7D.&bg=ffffff&fg=000&s=0&c=20201002) But,
But,  is equal to
is equal to  .
. .
.